图
辅助函数
FirstNeighbor(G,x):
求图G中顶点x的第一个邻接点,若有则返回顶点号。
若x没有邻接点或图中不存在x,则返回-1。
NextNeighbor(G,x,y):
- 假设图G中顶点y是顶点x的一个邻接点,返回除y之外,顶点x的下一个邻接点的顶点号
- 若y是x的最后一个邻接点,则返回-1。
邻接矩阵表示法
假设图 G 使用邻接矩阵表示,G.matrix[i][j] 为 1 表示顶点 i 和顶点 j 之间有边,为 0 表示没有边。
1 |
|
邻接表表示法
如果图 G 使用邻接表表示,G.adjList 是一个包含每个顶点的邻接顶点列表的数组。
1 |
|
FirstNeighbor(Graph G, int v):
- 邻接矩阵版本:遍历顶点
v的所有可能邻接顶点(从 0 到G.numVertices - 1),如果找到一个顶点i与顶点v有边(G.matrix[v][i] == 1),则返回这个顶点i。如果没有找到,则返回 -1。 - 邻接表版本:直接返回顶点
v的邻接顶点列表的第一个元素。如果列表为空,则返回 -1。
NextNeighbor(Graph G, int v, int w):
- 邻接矩阵版本:从顶点
w + 1开始,遍历顶点v的所有可能邻接顶点,找到第一个与顶点v有边的顶点i(G.matrix[v][i] == 1),返回这个顶点i。如果没有找到,则返回 -1。 - 邻接表版本:在顶点
v的邻接顶点列表中,找到顶点w,然后返回其后的下一个顶点。如果w是最后一个邻接顶点或没有更多邻接顶点,则返回 -1。
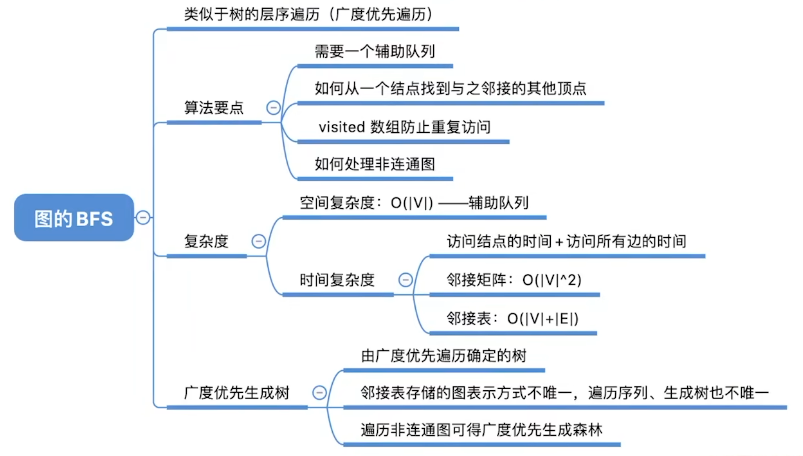
广度优先遍历
广度优先遍历(Breadth-First-Search, BFS)要点:
- 找到与一个顶点相邻的所有顶点
- 标记哪些顶点被访问过
- 需要一个辅助队列
BFS
1 | bool visited[MAX_VERTEX_NUM]; // 访问标记数组 |
执行顺序解析:
初始化邻接顶点
w:int w = FirstNeighbor(G, v);,返回顶点v的第一个邻接顶点w。检查是否有邻接顶点:
w >= 0- 如果
w为负数(例如,-1),表示没有邻接顶点,跳出循环。 - 如果
w为非负数,表示有邻接顶点,进入循环体。
- 如果
检查顶点
w是否已访问:if (!visited[w])- 检查
visited[w]是否为false,即顶点w是否尚未被访问。
- 检查
访问尚未访问的邻接顶点
w:如果未被访问,执行以下步骤:
1
2visited[w] = TRUE; // 对w做已访问标记
EnQueue(Q, w); // 顶点w入队- 调用
visit(w)函数,对顶点w进行访问(例如,打印顶点或进行其他处理)。 - 将
visited[w]设为TRUE,标记顶点w已被访问。 - 将顶点
w入队列Q,以便在之后的 BFS 阶段继续处理。
- 调用
更新邻接顶点
w为下一个邻接顶点:w = NextNeighbor(G, v, w);- 调用
NextNeighbor(G, v, w)函数,返回顶点v的下一个邻接顶点,更新w的值。
- 调用
重复步骤 2 到 5:
- 继续循环,检查新的
w是否非负,并按照上述步骤处理新的邻接顶点。
- 继续循环,检查新的
遍历序列的可变性
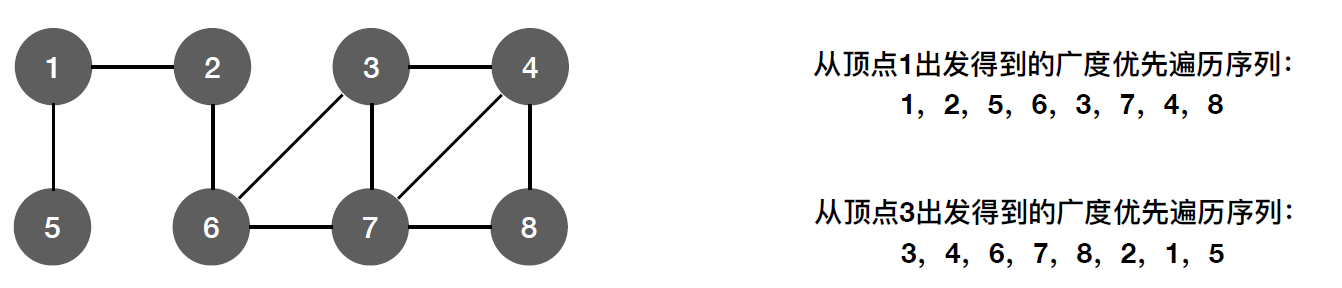
同一个图的邻接矩阵表示方式唯一,因此广度优先遍历序列唯一
同一个图邻接表表示方式不唯一,因此广度优先遍历序列不唯一
上述算法存在的问题
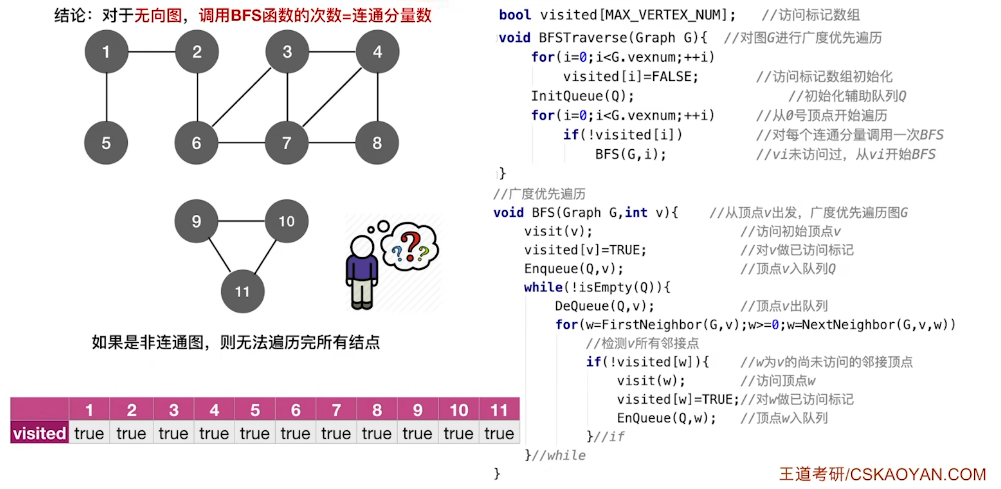
如果是非连通图,则无法遍历完所有结点。
要解决不能遍历非连通图的问题,可以在调用 BFS 之前或之后添加一个遍历所有顶点的循环,对于尚未访问的顶点,启动一次新的 BFS。这确保了图中所有连通分量都被遍历。
对于无向图,调用BFS函数的次数=连通分量数
1 | // 遍历整个图,处理非连通图的情况 |
复杂度分析
- 空间复杂度:最坏情况,辅助队列大小为 O(|V|)
- 时间复杂度
- 邻接矩阵存储的图:访问 V 个顶点需要O(|V|)的时间。查找每个顶点的邻接点都需要O(|V|)的时间,而总共有|V|个顶点,时间复杂度= O(|V|^2^)
- 总的时间复杂度为 O(|V|^2^),忽略低阶
- 邻接表存储的图:访问 V 个顶点需要O(|V|)的时间,查找各个顶点的邻接点共需要O(2E)的时间(E为所有边数)
- 总的时间复杂度为:时间复杂度= O(|V|+|E|)
- 邻接矩阵存储的图:访问 V 个顶点需要O(|V|)的时间。查找每个顶点的邻接点都需要O(|V|)的时间,而总共有|V|个顶点,时间复杂度= O(|V|^2^)
广度优先生成树:
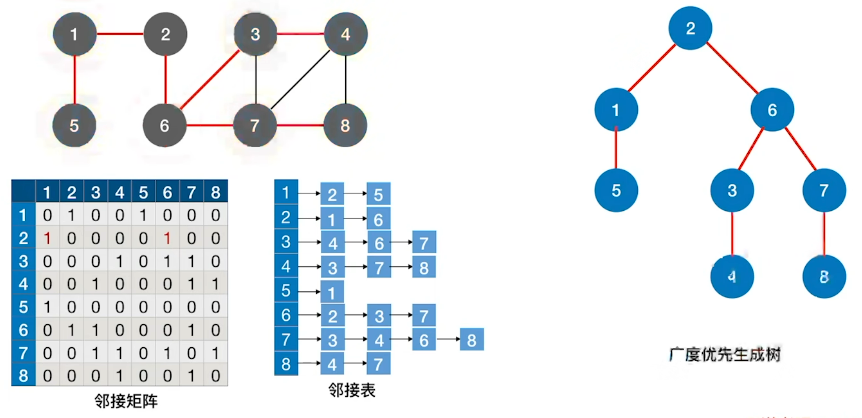
- 广度优先生成树由广度优先遍历过程确定。
- 由于邻接表的表示方式不唯一,因此基于邻接表的广度优先生成树也不唯一
- 对非连通图的广度优先遍历,可得到广度优先生成森林
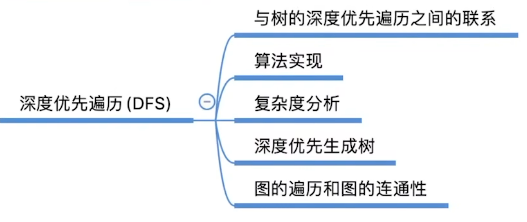
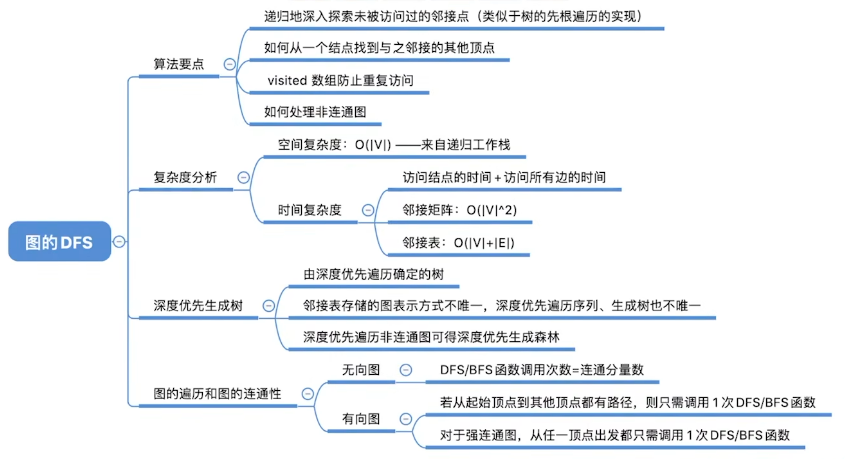
深度优先遍历
1 | bool visited[MAX_VERTEX_NUM]; // 访问标记数组 |
和之前一样,会出现无法遍历非连通图的问题
需要加上
1 | void DFSTraverse(Graph G) { |
复杂度和BFS一样。
- 同一个图的邻接矩阵表示方式唯一,因此深度优先遍历序列唯一,深度优先生成树也唯一
- 同一个图邻接表表示方式不唯一,因此深度优先遍历序列不唯一,深度优先生成树也不唯一
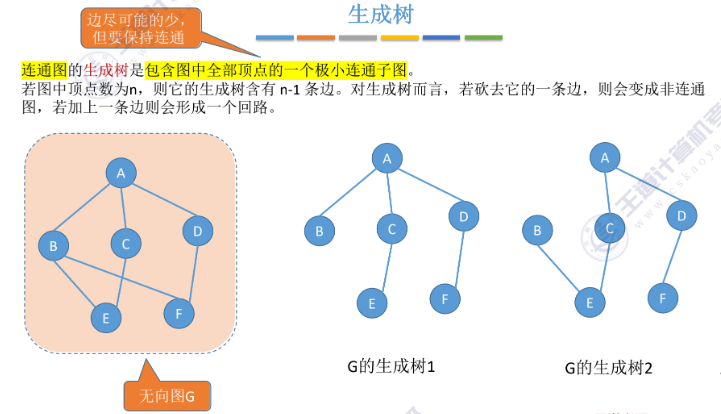
最小生成树
生成树:
连通图的生成树是包含图中全部顶点的一个极小连通子图。
若图中顶点数为n,则它的生成树含有n-1条边。对生成树而言,若砍去它的一条边,则会变成非连通图,若加上一条边则会形成一个回路
最小生成树(最小代价树):
对于一个带权连通无向图G = (V, E),生成树不同,每棵树的权(即树中所有边上的权值之和)也可能不同
设R为G的所有生成树的集合,若T为R中边的权值之和最小的生成树,则T称为G的最小生成树(Minimum-Spanning-Tree, MST)
最小生成树可能有多个,但边的权值之和总是唯一且最小的
最小生成树的边数 = 顶点数 - 1
砍掉一条则不连通,增加一条边则会出现回路
如果一个连通图本身就是一棵树,则其最小生成树就是它本身
只有连通图才有生成树,非连通图只有生成森林
求最小生成树的两种方法
Prim算法
Kruskal算法
Prim算法(普里姆):从某一个顶点开始构建生成树;每次将代价最小的新顶点纳入生成树,直到所有顶点都纳入为止。时间复杂度: O(V2)适合用于边稠密图。
Kruskal算法(克鲁斯卡尔):每次选择一条权值最小的边,使这条边的两头连通(原本已经连通的就不选)直到所有结点都连通。时间复杂度: O(lEllog2lEl )适合用于边稀疏图。
Prim 算法(普里姆):
算法思想:
从某一个顶点开始构建生成树;
每次将代价最小的新顶点纳入生成树,直到所有顶点都纳入为止。
时间复杂度:O(|V|^2),适合用于边稠密图



